


Message 1 of 18
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
Hello there,
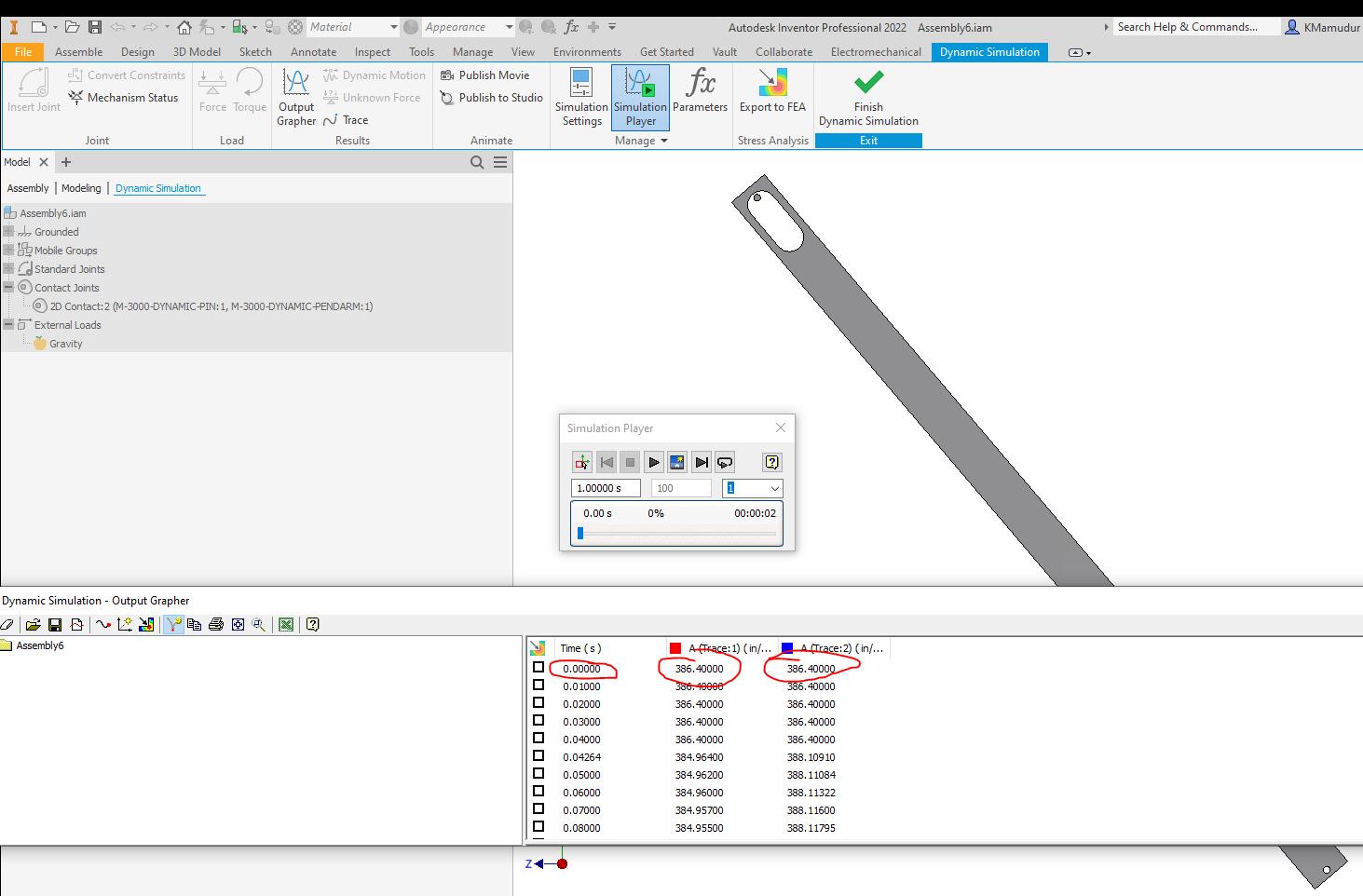
I modeled a simple arm hinged at top acting like a pendulum. I am trying to release drop the pendulum from an angle. Once I run the simulation and check the trace plots of acceleration @ time t=0 I see different acceleration numbers on different portions of the arm. I was expecting to see a CONSTANT 386.4 in/s^2 acceleration as the body is at rest at time =0. Whereas I see different g numbers at different points of the arm.
I have attached the model and also a screenshot showing different acceleration numbers at time t=0
Can you please explain what is happening?
Solved! Go to Solution.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}