Community
- Autodesk Community
- >
- Robot Structural Analysis Products Community
- >
- Robot Structural Analysis Forum
- >
- Re: API - Create a Frame Knee
Robot Structural Analysis Forum
Welcome to Autodesk’s Robot Structural Analysis Forums. Share your knowledge, ask questions, and explore popular Robot Structural Analysis topics.
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Reply
Topic Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page
Message 1 of 15
09-30-2018
11:00 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
09-30-2018
11:00 AM
Hi
I would like to create a Frame Knee.
I have set up a script for this, but it always creates a Column-Beam connection.
Can you tell me what it is wrong in my script ?
Thanks in advance for the help!
Best regards,
Xavier
Solved! Go to Solution.
Solved by Artur.Kosakowski. Go to Solution.
14 REPLIES 14
Message 2 of 15
10-01-2018
07:10 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
10-01-2018
07:10 AM
Hi @xblanchet
At the first glance your code should work but it cannot be checked without the example.
Try this:
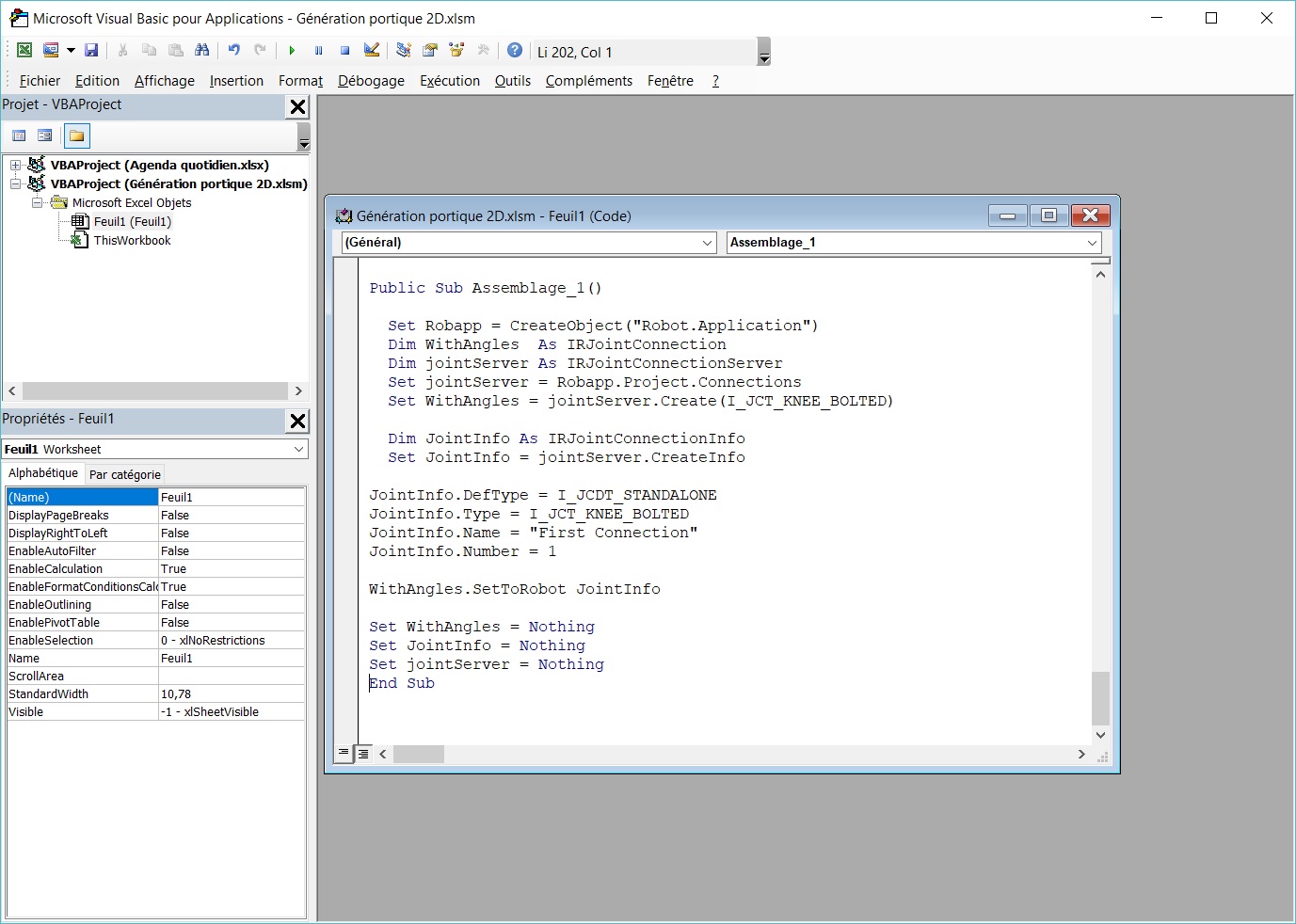
Sub Button1_Click()
Dim RobotApp As RobotApplication
Set RobotApp = CreateObject("Robot.Application")
Dim WithAngle As IRJointConnection
Dim JointServer As IRJointConnectionServer
Set JointServer = RobotApp.Project.Connections
Set WithAngle = JointServer.Create(I_JCT_KNEE_BOLTED)
Dim JointInfo As IRJointConnectionInfo
Set JointInfo = JointServer.CreateInfo
JointInfo.DefType = I_JCDT_STANDALONE
JointInfo.Type = I_JCT_KNEE_BOLTED
JointInfo.Name = "First connection"
JointInfo.Number = 1
WithAngle.SetToRobot JointInfo
End Sub
If I managed to answer your question(s) press the Accept as Solution button please. This will help other users to find solution(s) much faster. Thank you.
Artur Kosakowski
Message 3 of 15
10-01-2018
10:46 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
10-01-2018
10:46 AM
This script is exactly the same as me.
It creates a connection "Column-beam" whearas I want a Frame-Knee.
Do you have any solution ?

Message 4 of 15
10-02-2018
12:43 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
10-02-2018
12:43 AM
Hi @xblanchet
Try this:
Sub Button1_Click()
Dim RobotApp As RobotApplication
Set RobotApp = CreateObject("Robot.Application")
Dim WithAngle As IRJointConnection
Dim JointServer As IRJointConnectionServer
Set JointServer = RobotApp.Project.Connections
Set WithAngle = JointServer.Create(I_JCT_KNEE_BOLTED)
Dim FrameKnee As IRJointKnee
Set FrameKnee = WithAngle
FrameKnee.KneeType = I_JKT_BEAM2COLUMN
///////////////////////////////////////////////////////////////////////
KneeType = I_JKT_BEAM2BEAM
KneeType = I_JKT_BEAM2COLUMN
KneeType = I_JKT_BEAM2COLUMN_CONTINUE ( default )
//////////////////////////////////////////////////////////////////
Dim JointInfo As IRJointConnectionInfo
Set JointInfo = JointServer.CreateInfo
JointInfo.DefType = I_JCDT_STANDALONE
JointInfo.Type = I_JCT_KNEE_BOLTED
JointInfo.Name = "First connection"
JointInfo.Number = 1
WithAngle.SetToRobot JointInfo
End Sub
If I managed to answer your question(s) press the Accept as Solution button please. This will help other users to find solution(s) much faster. Thank you.
Artur Kosakowski
Message 5 of 15
11-12-2019
02:11 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
11-12-2019
02:11 AM
Hi @Artur.Kosakowski and @xblanchet ,
I try to copy/paste this code, without changing anything but i have an error on the line
Set JointServer = RobApp.Project.Connections
Error '13': incompatibility of typ
I don't understand why.
I have to optimize connection and i'm not allowed to use maximale concomitants forces. Then, i try to write a code which calculate a connection for each combinations and give me the maximal ratio of the connection.
Thanks just to explain me if i'm wrong with my 1st copy/paste ?
Sub attache()
Dim RobApp As IRobotApplication
Set RobApp = New RobotApplication
If Not RobApp.Visible Then
Set RobApp = Nothing
MsgBox "Open Robot and load Model", vbOKOnly, "ERROR"
Exit Sub
End If
Dim JointServer As IRJointConnectionServer
'Problem is on the following line
Set JointServer = RobApp.Project.Connections
Dim WithAngle As IRJointConnection
Set WithAngle = JointServer.Create(I_JCT_ANGLE)
Dim JointInfo As RJointConnectionInfo
Set JointInfo = JointServer.CreateInfo
JointInfo.Name = "Poteaux HEA160"
JointInfo.DefType = I_JCDT_STANDALONE
JointInfo.Number = 1
JointInfo.Type = I_JCT_ANGLE
WithAngle.SetToRobot JointInfo
End Sub
Message 6 of 15
03-29-2020
05:15 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
03-29-2020
05:15 AM
Sub attache1()
Dim RobApp As IRobotApplication
Set RobApp = New RobotApplication
If Not RobApp.Visible Then
Set RobApp = Nothing
MsgBox "Open Robot and load Model", vbOKOnly, "ERROR"
Exit Sub
End If
Dim JointServer As IRJointConnectionServer
Set JointServer = RobApp.Project.Connections
Dim WithAngle As IRJointConnection
Set WithAngle = JointServer.Create(I_JCT_KNEE_BOLTED)
Dim JointInfo As RJointConnectionInfo
Set JointInfo = JointServer.CreateInfo
JointInfo.Name = "Poteaux HEA160"
JointInfo.DefType = I_JCDT_STANDALONE
JointInfo.Number = 1
JointInfo.Type = I_JCT_KNEE_BOLTED
' // à ajouter
' ------------>
Dim FrameKnee As IRJointKnee
Set FrameKnee = WithAngle
FrameKnee.KneeType = I_JKT_BEAM2COLUMN
' // Exemples d'initialisation des parametres de l'attache
' ----------------------------------------------------------------------------------
With FrameKnee
'// Sections
.Column.Section = "HEA 160"
.Beam.Section = "IPE 200"
'// Platine
.PlatePosition = 0
With .Plate
.Length = 400: .Width = 160: .Thick = 12
End With
'// Jarret
.BracketLow.Height = 200
'// Boulons
With .Bolts
SpH = 90
NbV = 4: SpV = 100: .Height1 = 50: .Rows = NbV
For i = 1 To NbV - 1: Call .SpacingV.Set(i, SpV): Next i
Call .SpacingH.Set(1, SpH)
.ShearPortion = I_JBSP_THREADED
End With
End With
' ---------------------------------------------------------------------------------
WithAngle.SetToRobot JointInfo
' // Exemple de calcul sous efforts manuels
' ----------------------------------------------------------------------------------
Dim load As New RJointKneeLoad
With load
.N = 500: .M = 2000: .Q = 500
End With
Ratio = JointServer.Calculate(1, load)
MsgBox "Ratio =" & Int(100 * Ratio) & "%"
End Sub
Message 7 of 15
10-02-2020
06:15 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
10-02-2020
06:15 AM
Hello Stephane, can you please translate this code to C#? I have problem with this part.
Dim FrameKnee As IRJointKnee
Set FrameKnee = WithAngle
Message 8 of 15
10-02-2020
12:07 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
10-02-2020
12:07 PM
Hello Anton,
You will find a complete example with loading translated in C#.
I do not have the opportunity and the time to give more details on the options available.
// --------------------------------------------------------
// ROBOT
// --------------------------------------------------------
// To Connect Robot Structural Analysis
RobotOM.IRobotApplication Robapp = new RobotOM.RobotApplication();
if (Robapp.Visible != 0)
{
// To init and give a first example of connection parameters
// ------------------------------------------------------------------------------------------------------
// Variables
string ColSec = "HEA 160"; string BeamSec = "IPE 200"; //............................... Profile Sections
string ColMat = "S 235"; string BeamMat = "S 235"; //................................... Profile Material
string ComponentMat = "S 235"; //..................................................... Component Material
double pp = 0; double hp = 400; double bp = 160; double tp = 15; //................................ Plate
double bl_l = 300; double bl_h = 200; double bl_b = 100; double bl_tf = 10; double bl_tw = 6; //.. Haunch
double SLtf = 8; double SUtf = 8; //.......................................................... Stiffeners
string BltClass = "4.6"; string BltSize = "12"; //................................................. Bolts
long SpH = 90; int NbH = 2; //...................................................................... Cols
long SpV = 100; int NbV = 4; int h1 = 50; //........................................................ Rows
// Robot Connection
IRJointConnectionServer JointServer = Robapp.Project.Connections;
IRJointConnection WithAngle = JointServer.Create(IRJointConnectionType.I_JCT_KNEE_BOLTED);
RJointConnectionInfo JointInfo = JointServer.CreateInfo();
int JointFreeNumber = JointServer.Count + 1;
JointInfo.Number = JointFreeNumber;
JointInfo.Name = "Connection " + ColSec + "/" + BeamSec;
JointInfo.Type = IRJointConnectionType.I_JCT_KNEE_BOLTED;
JointInfo.DefType = IRJointConnectionDefType.I_JCDT_STANDALONE;
IRJointKnee FrameKnee = (IRJointKnee)JointServer.Create(IRJointConnectionType.I_JCT_KNEE_BOLTED);
FrameKnee = (IRJointKnee)WithAngle;
// Type
FrameKnee.KneeType = IRJointKneeType.I_JKT_BEAM2COLUMN;
// Section, Material
FrameKnee.Column.Section = ColSec; FrameKnee.Column.Material = ColMat;
FrameKnee.Beam.Section = BeamSec; FrameKnee.Beam.Material = BeamMat;
FrameKnee.DefComponentMaterial = ComponentMat;
// Eurocode
FrameKnee.CodeParamsEC32.GloblalAnalysisType = IRJointGlobalAnalysisType.I_JGAT_ELASTIC;
FrameKnee.CodeParamsEC32.FrameType = IRJointFrameType.I_JFT_SWAY;
// Plate
FrameKnee.PlatePosition = pp;
var k_Pl = FrameKnee.Plate;
k_Pl.Exist = 1;
k_Pl.Length = hp; k_Pl.Width = bp; k_Pl.Thick = tp;
// Brackets
var k_BL = FrameKnee.BracketLow;
k_BL.Exist = 1;
k_BL.Length = bl_l; k_BL.Height = bl_h; k_BL.Width = bl_b; k_BL.ThickFlange = bl_tf; k_BL.ThickWeb = bl_tw;
var k_BU = FrameKnee.BracketUp;
k_BU.Exist = 0;
// Stiffeners
FrameKnee.StiffLow.Thick = SLtf;
FrameKnee.StiffUp.Thick = SUtf;
// Bolts
var k_Blt = FrameKnee.Bolts;
k_Blt.ClassName = BltClass;
k_Blt.DiameterName = BltSize;
k_Blt.Height1 = h1;
k_Blt.EqualSpac = 1;
k_Blt.Cols = NbH; k_Blt.SpacingH.Set(1, SpH);
k_Blt.Rows = NbV; for (int i = 1; i < NbV; i++) {k_Blt.SpacingV.Set(i, SpV); }
k_Blt.ShearPortion = IRJointBoltShearPortion.I_JBSP_THREADED;
WithAngle.SetToRobot(JointInfo);
// Loads
RJointKneeLoad load = new RJointKneeLoad();
load.M = 2000;
load.N = 500;
load.Q = 500;
JointServer.Calculate(JointFreeNumber, (RJointLoad)load);
}
else
{
MessageBox.Show("Start Robot first", "Error", MessageBoxButtons.OK, MessageBoxIcon.Exclamation);
}

{kind=link}
Message 9 of 15
10-02-2020
12:48 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
Message 10 of 15
10-23-2020
12:28 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
10-23-2020
12:28 AM
This part:
k_Blt.Rows = NbV; for (int i = 1; i < NbV; i++) {k_Blt.SpacingV.Set(i, SpV); }
does not work if I set NbV to more than 5. If I set it to 6 this is what I get:
{kind=link}
Message 11 of 15
10-23-2020
02:10 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
10-23-2020
02:10 AM
I found solution to my question.
As k_Blt.SpacingV is a array, first you must set size of that array with k_Blt.SpacingV.SetSize
Message 12 of 15
10-23-2020
05:44 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
10-23-2020
05:44 AM
yes, my code limited to an example (see previous posts) .
k_Blt.SpacingV is a array, valid if k_Blt.Rows = NbV first, with an upper limit that could be set with .SetSize(NbV-1)
it is important to stay consistent between plate dimensions and the bolt spacing so that the assembly is taken into account.
best regards
Updated 28/05/2023
Message 13 of 15
06-21-2024
04:27 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
06-21-2024
04:27 AM
Bonjour, merci pour ces informations. Je rencontre un problème. Quand je change le nombre de rangées de boulons (nv), il remplace bien la valeur, mais dans le dimensionnement, il ne le prend pas en compte. Je dois cliquer sur appliquer pour que cela fonctionne. Il y a une possibilité pour faire cela dans le programme ?
Message 14 of 15
06-21-2024
05:27 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
06-21-2024
05:27 AM
I don’t quite understand your request. It seems that you used one of the codes above to create a first fixing. When you interact with your project's dialog box, you can modify the values.
You would like to be able to modify all or part of the input data, particularly the number of bolts, and restart the calculation.
Please keep in mind that the codes provided in the forum are meant to assist and help you understand the concepts.
Best Regards
Message 15 of 15
06-22-2024
07:55 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
06-22-2024
07:55 AM
J'ai résolu mon problème. Je n'avais pas intégré dans mon code .SetSize et la MAJ de la fiche de calcul se faisait mal. Merci de votre réactivité.
Reply
Topic Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page
Forums Links
Can't find what you're looking for? Ask the community or share your knowledge.
Post to forums
