Community
- Forums Home
- >
- Robot Structural Analysis Products Community
- >
- Robot Structural Analysis Forum
- >
- Re: Negative critical coefficients in buckling analysis
Robot Structural Analysis Forum
Welcome to Autodesk’s Robot Structural Analysis Forums. Share your knowledge, ask questions, and explore popular Robot Structural Analysis topics.
Turn on suggestions
Auto-suggest helps you quickly narrow down your search results by suggesting possible matches as you type.
Negative critical coefficients in buckling analysis
13 REPLIES 13
SOLVED
Reply
Topic Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page
Message 1 of 14
08-18-2011
08:07 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
08-18-2011
08:07 AM
Question from the user:
What does it mean with a negative critical coefficient?
Pawel Pulak
Technical Account Specialist
Solved! Go to Solution.
Solved by Pawel.Pulak. Go to Solution.
13 REPLIES 13
Message 2 of 14
08-18-2011
08:11 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
08-18-2011
08:11 AM
The basic results of buckling analysis are critical coefficients (eigenvalues) and buckling shapes (eigenvectors) corresponding to these critical coefficients.
Each critical coefficient is the factor by which the loads of appropriate load case should be multiplied to obtain appropriate loss of stability (buckling shape or mode).
Negative critical coefficient for some buckling mode means that the loads of appropriate load case shoud have opposite direction to result in such buckling shape. Of course in practice buckling modes with negative critical coefficients should be neglected.
In some situations (for instance optimized truss girders with slender tendons working in tension for standard load conditions) positive critical coefficient can be preceded by a lot of negative ones. It is so because by default analysis is searching for critical buckling coefficients starting from zero and considering absolute values of them (so both positive and negative ones). It may result in necessity to calculate a lot of critical coefficients before finding the first positive one. It can be avoided setting non-zero shift to start searching from some positive value - see the attached screen capture.
Pawel Pulak
Technical Account Specialist
Message 3 of 14
08-18-2011
12:05 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
08-18-2011
12:05 PM
An interesting thing: after selecting ‘Block subspace iteration’ and defining the positive value of the shift and then returning to the selection of ‘Subspace iteration’, the program still runs calculations as with the ‘Block subspace’ method, or possibly applies the initial shift to the ‘Subspace’ method?
Message 4 of 14
08-19-2011
01:17 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
08-19-2011
01:17 AM
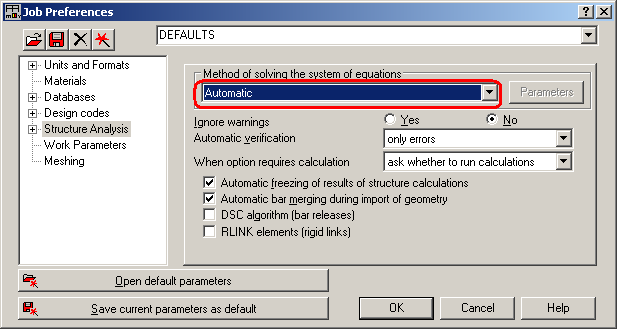
Probably you have not noticed that "Block subspace iteration" method was also used on the very beginning - prior to switching from "Subspace iteration" to "Block subspace iteration".
By default automatic choice of solver is active (see the attached screen capture) and in case of bigger models it results in using Sparse solver for static analysis. When Sparse solver is used then buckling analysis is run using "Block subspace iteration" method ignoring settings from parameters of buckling analysis.
Pawel Pulak
Technical Account Specialist
Message 5 of 14
11-03-2016
11:38 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
11-03-2016
11:38 PM
In Robot it is written that shifting clould cause problems. How to know what value for shift should I choose? 0.1? 1.0? 5.0?

Message 6 of 14
11-04-2016
07:21 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
11-04-2016
07:21 AM
This information in Help is related to the possible risk of loosing some small positive critical coefficients when setting too big shift.
For instance if your model contains a lot of slender tendons in tension and because of it reports a huge number of negative critical coefficients only in the range of for instance -0.1 to - 0.6 setting the shift equal to +2 is correct only if for the specified number of buckling modes Robot finds the possible buckling modes with the critical coefficients from +0.3 to +2 range.
That is why in such case it is safer to set shift to +0.3 and to specify a big number of searched modes.
This topic was also discussed in this forum post.
Regards,
Pawel Pulak
Technical Account Specialist
Message 7 of 14
11-04-2016
07:54 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
11-04-2016
07:54 AM
Thanks, that helped. Especially for filtering out large critical coeficcients larger than 10
Message 8 of 14
06-26-2020
03:59 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
06-26-2020
03:59 AM
How can I set the critical coefficients to only positive values?
Negative eigenvalues are usually problematic. They will revert loads in the model, which usually is not possible in real problems.
Analyzing any shell structure will be a very frustrating task if values cannot be switched to positive only.
Message 9 of 14
06-26-2020
04:23 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
06-26-2020
04:23 AM

Message 10 of 14
06-26-2020
04:31 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
06-26-2020
04:31 AM
Thanks Rafal,
Just had a look at 2021 version and it doesn't have this option. What version are you using?
Message 11 of 14
06-26-2020
04:51 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report

Message 12 of 14
06-26-2020
05:00 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
Message 13 of 14
01-27-2021
03:53 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
01-27-2021
03:53 AM
Hi,
is there a way to make multiple combination selection and set "determine positive critical ........" all at once, or the only way is selection case by case ?
Kind regards!
Message 14 of 14
01-27-2021
04:29 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report
Reply
Topic Options
- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Printer Friendly Page

{kind=link}
{kind=link}